 العربية
العربية English
English français
français Deutsch
Deutsch русский
русский español
español português
português 日本語
日本語 한국의
한국의 Tiếng việt
Tiếng việt


اتصل بنا الآن
هاتف : + 86-4000988557؛
سكايب المعرف: gfreex@hotmail.com؛
WeChat: STEP_ADTECH ؛
QQ المعرف: 8936906.

بالنظر إلى أن الكثافة الحالية للروبوتات الصناعية في الصناعة التحويلية العالمية هي 55 ، بينما كثافة الصين الروبوتات الصناعية هي 21 فقط ، وهو أقل بكثير من البلدان المتقدمة مثل اليابان وكوريا الجنوبية وألمانيا والولايات المتحدة ، وفي سياق التصنيع الذكي ، فإن سياسة "آلة استبدال" يستمر تنفيذه. لا يزال هناك مجال كبير لـ النمو. شركات ذات مفهوم ذات صلة مثل Inovance التكنولوجيا ، الروبوتات ، Zhiyun المحدودة ، كيوان المحدودة ، و Qinchuan ستحقق أداة الآلة تطورًا أفضل في ظل الروبوت توزيعات الأرباح.
مرحلة تطوير الروبوتات الصناعية
يمكن تقسيم تطوير الروبوتات الصناعية عادةً إلى ثلاثة أجيال:
1. الجيل الأول من الروبوتات الصناعية:
عادةً ما يشير إلى “برمجة روبوتات صناعية التي يتم تسويقها حاليًا واستخدامها دوليًا ، والمعروفة أيضًا باسم "التدريس وإعادة إنتاج الروبوتات الصناعية "، أي لكي ينجز الروبوت الصناعي مهمة معينة ، سيكمل المشغل أولاً المهمة. جميع أنواع المعرفة (مثل مسار الحركة وظروف التشغيل وتسلسل التشغيل ووقت التشغيل إلخ) الروبوتات الصناعية يمكن "تعليمها" بوسائل مباشرة أو غير مباشرة. بعد أن تحفظ الروبوتات الصناعية هذه المعرفة ، هم يمكن "إعادة إنتاج" التعليمات ، ضمن نطاق دقة معين ، إعادة إنتاج مختلف الإجراءات التعليمية بأمانة بشكل متكرر. في عام 1962 ، الأول Unimate تم وضع الروبوت الصناعي للأتمتة العالمية للولايات المتحدة تستخدم في المحركات العامة للولايات المتحدة ، إيذانا بميلاد الجيل الأول من الروبوتات الصناعية.
2 ، الجيل الثاني من الروبوتات الصناعية:
يشير عادةً إلى " روبوت ذكي" مع نوع من الذكاء (مثل اللمس ، القوة ، الرؤية ، إلخ). هذا هو ، بعد أن تتلقى المستشعرات معلومات مثل اللمس والقوة والرؤية ، يتحكم الكمبيوتر في الروبوت آلة التشغيل لإكمال العمليات. المناسبة المقابلة في عام 1982 ، قامت المحركات العامة في الولايات المتحدة بتجهيز الروبوت الصناعي بنظام رؤية على خط التجميع ، مما أدى إلى ظهور جيل جديد من الروبوتات الصناعية الذكية.
3 ، الجيل الثالث من الروبوتات الصناعية:
هو ما يسمى "الروبوت الصناعي من النوع الوحيد". لا يقتصر الأمر على وظيفة الإدراك فحسب ، بل لديه أيضًا [اتخاذ قرار] معين والتخطيط لا يزال الجيل الأول من الروبوتات الصناعية في مرحلة البحث المخبري. بعد الولادة والنمو والنضج في هذه الفترة ، أصبحت الروبوتات الصناعية من المعدات الأساسية التي لا غنى عنها في الصناعة هناك حوالي 750.000 روبوت صناعي في العالم يقاتل جنبًا إلى جنب مع العمال والأصدقاء على جميع خطوط الإنتاج.
كنجم صاعد لعائلة الروبوتات ، تميل الروبوتات الخاصة إلى من خلف بسبب الخاصة بهم مجموعة واسعة من الاستخدامات. الروبوتات الخاصة لأغراض مختلفة مثل الروبوتات البشرية والروبوتات الزراعية ، روبوتات الخدمة، وروبوتات تحت الماء ، وروبوتات طبية ، وروبوتات عسكرية ، وروبوتات ترفيهية ، و إنها تتحرك نحو العملية بوتيرة سريعة.
تصنيف الروبوتات الصناعية
يمكن تقسيم الروبوتات الصناعية إلى الأنواع التالية وفق طرق مختلفة
1. الروبوتات الصناعية مقسمة إلى الفئات التالية وفقًا لصيغة إحداثيات مناور: (يشير شكل الإحداثيات إلى شكل نظام الإحداثي المرجعي المأخوذ من ذراع المعالج عندما يتحرك.)
(1) الديكارتي تنسيق الروبوت الصناعي
يتكون جزء حركته من ثلاث حركات خطية متعامدة بشكل متبادل (أي PPP) ، ومساحة عملها مستطيلة يمكن قراءة مسافة التحرك في كل محور مباشرة على كل محور . إنه بديهي وسهل البرمجة وحساب الموضع والوضعية ، ولديه دقة عالية في تحديد المواقع ، ولا يوجد تحكم في الاقتران ، وبنية بسيطة ، لكن الجسم يشغل مساحة كبيرة. نطاق الحركة صغير ، والمرونة ضعيفة ، ومن الصعب التنسيق مع الروبوتات الصناعية الأخرى.
(2) روبوت صناعي منسق أسطواني
يتم تحقيق شكل حركته بواسطة نظام حركة مكون من دوران واحد وحركتين. مساحة عملها أسطوانية. بالمقارنة مع الروبوت الصناعي ذي التنسيق المستطيل ، تحت نفس ظروف مساحة العمل ، يشغل الجسم حجمًا صغيرًا نطاق الحركة كبير ، ودقة موضعها تأتي في المرتبة الثانية بعد روبوتات التنسيق الديكارتية ، ومن الصعب التنسيق مع الروبوتات الصناعية الأخرى.
(3) تنسيق روبوت صناعي كروي
يُعرف أيضًا باسم الروبوت الصناعي للتنسيق القطبي ، وتتكون حركة ذراعه من دورانين وحركة خطية واحدة (على سبيل المثال RRP ، دوران واحد ، حركة حركة تلسكوبية واحدة). مساحة عملها عبارة عن كرة ، يمكنها تكوين حركات. و يمكنه استيعاب قطعة العمل المنسقة على الأرض أو تعليم الموضع المنخفض ، ودقة موضعه عالية ، وخطأ الموضع يتناسب مع طول الذراع.
(4) مفاصل متعددة روبوت صناعي
يُعرف أيضًا باسم روبوت صناعي منسق دوار يشبه ذراع هذا الروبوت الصناعي الطرف العلوي لجسم الإنسان. مفاصلها الثلاثة الأولى هي المفصل الدوار (RRR). يتكون الروبوت الصناعي بشكل عام من عمود وذراع كبير وصغير. يتكون العمود والذراع الكبير ، حيث يتم تشكيل مفصل الكوع بين مفصل الكتف والذراع والساعد ، والتي يمكن أن تجعل الجزء العلوي من الذراع يدور ويميل ويتأرجح ، ويمكن أن يؤدي الجزء السفلي من الذراع إلى تحريكه. هيكلها هو الأكثر إحكاما ومرونة وله أصغر أثر. يمكن أن يعمل بالتنسيق مع الروبوتات الصناعية الأخرى ، ولكن لديه دقة منخفضة في الموضع ومشاكل في التوازن والتحكم هذا يتم استخدام نوع الروبوت الصناعي بشكل متزايد
(5) مستو روبوت صناعي من النوع المشترك
يستخدم مفصل متحرك ومفصلين دوارين (PRR) ، ويدرك المفصل المتحرك الحركة لأعلى ولأسفل ، ويتحكم المفصلان الدواران في الأمام والخلف ، وحركات اليسار واليمين. هذا يُعرف شكل الروبوت الصناعي أيضًا باسم (SCARA (Seletive روبوت تجميع الامتثال الذراع) التجميع الروبوت. إنه مرن في الاتجاه الأفقي ، ولديه صلابة كبيرة في الاتجاه الرأسي. لديه بنية بسيطة وحركات مرنة ، وتُستخدم في الغالب للتجميع العمليات. وهي مناسبة بشكل خاص لتجميع المكونات للأجزاء صغيرة الحجم ، مثل المكونات الإضافية والتجميع في صناعة الإلكترونيات.
2. الروبوتات الصناعية مقسمة إلى الفئات التالية وفقًا لوضع القيادة:
(1) روبوت صناعي هوائي
هذا نوع الروبوت الصناعي يستخدم الهواء المضغوط لقيادة مناور. وتتمثل مزاياه في مصدر الهواء الملائم ، والعمل السريع ، والبنية البسيطة ، والتكلفة المنخفضة ، وعدم التلوث. العيب هو أن الهواء قابل للضغط ، مما يؤدي إلى ضعف سرعة العمل الاستقرار. يبلغ ضغط المصدر بشكل عام حوالي 6 كيلو باسكال فقط ، وبالتالي فإن قوة الخطف لهذا النوع من الروبوتات الصناعية صغيرة ، وعمومًا عشرات النيوتن فقط ، والحد الأقصى هو أكثر من 100 نيوتن.
(2) روبوت صناعي هيدروليكي
الضغط الهيدروليكي أعلى بكثير من ضغط الهواء ، بشكل عام حوالي 70 كيلو باسكال ، لذلك فإن الروبوت الصناعي لناقل الحركة الهيدروليكي لديه قدرة انتزاع كبيرة ، والتي يمكن أن تصل إلى آلاف النيوتن. هذا نوع الروبوت الصناعي له هيكل مضغوط ، وناقل حركة سلس ، وعمل حساس ، ولكن لديه متطلبات عالية للختم وغير مناسب للعمل في البيئات ذات درجات الحرارة العالية أو المنخفضة.
(3) روبوت صناعي كهربائي
هذا هو أكثر أنواع الروبوتات الصناعية استخدامًا ، ليس فقط لأن من بين مجموعة كبيرة ومتنوعة من المحركات الكهربائية ، فإنه يوفر مجموعة متنوعة من الخيارات لتصميم الروبوت الصناعي ، ولكن أيضًا بسبب هم يمكن استخدام مجموعة متنوعة من أساليب التحكم المرنة. في الأيام الأولى ، تم استخدام محركات السائر للقيادة ، ثم تم تطوير وحدات محرك سيرفو يعمل بالتيار المستمر. في الوقت الحاضر ، تتطور أيضًا وحدات محرك سيرفو التيار المتردد بسرعة. هؤلاء تقوم وحدات القيادة إما بإدارة المعالج مباشرة ، أو يتم دفعها بعد التباطؤ عبر جهاز مثل المخفض التوافقي. الهيكل مضغوط للغاية وبسيط.
نظام التحكم في الروبوت الصناعي
يتكون هيكل نظام الروبوت من الروبوت جزء الآلية ومجموعة أجهزة الاستشعار وجزء التحكم ومعالجة المعلومات الجزء يعد نظام التحكم جزءًا أساسيًا من صناعة الروبوت
1. الوظائف التي سيحققها نظام التحكم في الروبوت الصناعي
يتم استخدام نظام التحكم في الروبوت للتحكم في المعالج لإكمال مهام معينة. وظائفه الأساسية كما يلي:
(1) الذاكرة الوظيفة:
تخزين تسلسل الوظائف ، مسار الحركة ، نمط الحركة ، سرعة الحركة والمعلومات المتعلقة بعملية الإنتاج.
(2) التدريس الوظيفة:
غير متصل البرمجة ، التدريس عبر الإنترنت ، غير المباشر التدريس. يشمل التدريس عبر الإنترنت مربع التدريس والتعليم الموجه.
(3) وظيفة الاتصال مع الأجهزة الطرفية
واجهة الإدخال والإخراج ، واجهة الاتصال ، واجهة الشبكة ، واجهة التزامن
(4) إعداد التنسيق الوظيفة:
هناك أربعة أنظمة تنسيق: مشترك ، مطلق ، أداة ، و معرف من قبل المستخدم
(5) رجل - آلة الواجهة:
مربع التدريس ، لوحة التشغيل ، العرض الشاشة.
(6) جهاز الاستشعار الواجهة:
كشف الموقف ، الرؤية ، اللمس ، القوة ، إلخ.
(7) مؤازرة الموقع الوظيفة:
روبوت متعدد المحاور الربط والتحكم في الحركة والتحكم في السرعة والتسارع والتعويض الديناميكي ، إلخ.
(8) حماية سلامة تشخيص الأخطاء الوظيفة:
مراقبة حالة النظام أثناء التشغيل ، حماية السلامة في ظل ظروف الخطأ والخطأ التشخيص الذاتي.
2. تكوين نظام التحكم في الروبوت الصناعي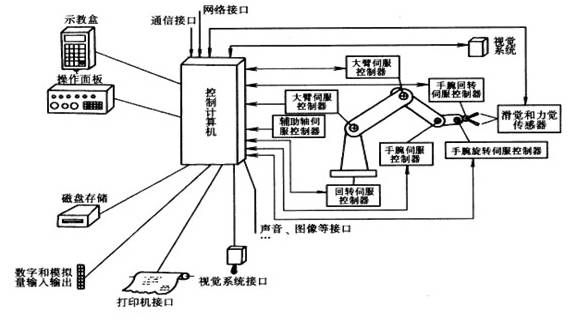
مخطط كتلة نظام التحكم في الروبوت
(1) التحكم الكمبيوتر:
تنظيم الإرسال والأوامر لنظام التحكم بشكل عام ، تكون الحواسيب الصغيرة والمعالجات الدقيقة 32 بت و 64 بت وما إلى ذلك ، مثل Pentium سلسلة cpus وأنواع أخرى من وحدات المعالجة المركزية (CPU).
(2) تعليم مربع:
تعليم الروبوت مسار العمل وإعدادات المعلمات ، وكذلك الإنسان والحاسوب التفاعل ، لها وحدة المعالجة المركزية ووحدة التخزين المستقلة الخاصة بها ، وتحقق تفاعل المعلومات مع الكمبيوتر المضيف من خلال الاتصال التسلسلي.
(3) عملية لوحة:
يتكون من العديد من أزرار التشغيل ومؤشرات الحالة ، ويكمل فقط العمليات الوظيفية الأساسية
(4) قرص صلب وقرص مرن التخزين:
ذاكرة محيطية لتخزين برامج عمل الروبوت
(5) المدخلات الرقمية والتناظرية و الإخراج:
الإدخال أو الإخراج لأوامر مختلفة وتحكم
(6) الطابعة الواجهة:
تسجيل المعلومات المختلفة التي يجب أن تكون إخراج.
(7) جهاز الاستشعار الواجهة:
يستخدم في الكشف التلقائي عن المعلومات لتحقيق التحكم المتوافق مع الروبوت ، بشكل عام ، أجهزة استشعار القوة واللمس والرؤية.
(8) المحور وحدة التحكم:
أكمل موضع مفصل الروبوت وسرعته وتسارعه
(9) معدات مساعدة التحكم:
يستخدم للتحكم في المعدات المساعدة التي تتعاون مع الروبوت ، مثل القابض مناور ، إلخ.
(10) الاتصال الواجهة:
إدراك تبادل المعلومات بين الروبوتات والأجهزة الأخرى ، بوجه عام ، واجهات تسلسلية ، واجهات متوازية ، إلخ.
(11) واجهة الشبكة
1) إيثرنت الواجهة: يمكن تحقيق الاتصال المباشر بالكمبيوتر للعديد من الروبوتات الفردية أو من خلال Ethernet ، ومعدل نقل البيانات يصل إلى 10 ميجابت / s ، ويمكن برمجة برنامج التطبيق مباشرة على الكمبيوتر باستخدام وظائف مكتبة Windows ، و tcp / ip يمكن دعم بروتوكول الاتصال ، وتحميل البيانات والبرامج إلى كل وحدة تحكم روبوت من خلال واجهة ethernet.
2) فيلدبوس الواجهة: يدعم مجموعة متنوعة من فيلدبوس المواصفات ، مثل شبكة الجهاز ، و ab remote I / O ، و Interbus-s ، و profibus-DP ، و M-NET ، إلخ.
3. تصنيف أنظمة التحكم في الروبوتات الصناعية
(1) التحكم في البرنامج النظام:
تطبيق وظيفة تحكم منتظمة معينة على كل درجة من درجات الحرية ، ويمكن للروبوت أن يدرك المساحة المسار المطلوب.
(2) نظام التحكم التكيفي:
متى تتغير الظروف الخارجية ، من أجل ضمان الجودة المطلوبة أو لتحسين جودة التحكم مع تراكم الخبرة ، تعتمد العملية على مراقبة حالة آلة التشغيل وخطأ المؤازرة ، ثم ضبط معلمات نموذج غير خطي حتى الخطأ حتى أنه يختفي. يمكن أن تتغير بنية هذا النظام ومعلماته تلقائيًا مع الوقت و الشروط.
(3) الذكاء الاصطناعي النظام:
من المستحيل تجميع برامج الحركة مسبقًا ، ولكنها تتطلب تحديدًا في الوقت الفعلي لتأثير التحكم بناءً على معلومات الحالة المحيطة التي تم الحصول عليها أثناء الحركة .
محرك الوضع: انظر نظام محرك الروبوت الصناعي
تمرين الطريقة:
(4) نقطة اكتب:
يتطلب من الروبوت أن يتحكم بدقة في وضع المستجيب النهائي ، بغض النظر عن المسار ؛
(5) المسار النوع:
يتطلب من الروبوت أن يتحرك حسب المسار والسرعة
(6) التحكم الحافلة:
نظام التحكم في ناقل المعيار الدولي استخدم ناقل المعيار الدولي كحافلة تحكم لنظام التحكم ، مثل VME ، MULTI-bus ، STD-bus ، PC-bus.
(7) التحكم في ناقل مخصص النظام:
تم تعريف الناقل واستخدامه من قبل الشركة المصنعة نفسها يستخدم كنظام تحكم ناقل.
(8) البرمجة الطريقة:
برمجة الإعدادات الفيزيائية نظام. يُعيِّن المُشغل مفتاحًا محددًا ثابتًا لتحقيق عملية البرنامج الخاصة بالبدء والإيقاف ، والتي لا يمكن استخدامها إلا لعمليات الانتقاء والتثبيت البسيطة.
(9) عبر الإنترنت البرمجة:
يتم إكمال طريقة برمجة عملية الذاكرة لتشغيل المعلومات من خلال التدريس البشري ، بما في ذلك التدريس المباشر (أي التدريس باليد التدريس) مربع تعليم وتدريس المحاكاة
(10) غير متصل البرمجة:
لا تعلم الروبوت الفعلي مباشرة ، لكن افصل عن بيئة العمل الفعلية ، وإنشاء برنامج تعليمي ، وإنشاء مسار الروبوت عن بُعد دون اتصال باستخدام الروبوتات عالية المستوى والبرمجة اللغات.
4. هيكل نظام التحكم في الروبوت
يمكن تقسيم أنظمة التحكم في الروبوت إلى ثلاث فئات حسب الخاصة بهم طرق التحكم.
(1) نظام تحكم مركزي (تحكم مركزي نظام): 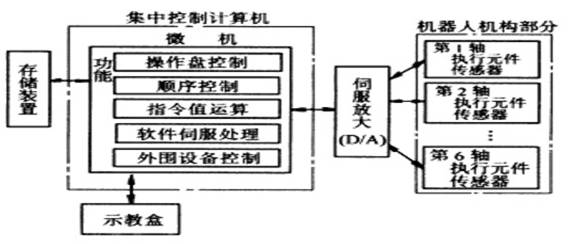
مخطط كتلة نظام التحكم المركزي
يُستخدم الكمبيوتر لتحقيق جميع وظائف التحكم. الهيكل بسيط والتكلفة منخفضة ، لكن الأداء في الوقت الحقيقي ضعيف ومن الصعب التوسع. هذا غالبًا ما يستخدم الهيكل في الروبوتات. المبكرة يظهر مخطط الكتلة في الشكل.
الملف المستند إلى الكمبيوتر يستفيد نظام التحكم المركزي بشكل كامل من انفتاح موارد الكمبيوتر ، ويمكن أن يحقق الانفتاح: الجيد يمكن دمج مجموعة متنوعة من بطاقات التحكم وأجهزة الاستشعار وما إلى ذلك في التحكم من خلال المعيار PCI أو عبر منافذ تسلسلية قياسية ومنافذ النظام.
مزايا أنظمة التحكم المركزية هي: انخفاض تكاليف الأجهزة ، وجمع المعلومات بسهولة وتحليلها ، وسهولة تحقيق التحكم الأمثل في النظام ، وتحسين التكامل والتنسيق ، وأكثر ملاءمة أجهزة النظام التوسع. كما أن عيوبها واضحة: يفتقر التحكم في النظام إلى المرونة ، وخطر التحكم سهل التركيز بمجرد حدوث الفشل ، يكون تأثيره واسع النطاق والعواقب خطيرة ؛ بسبب متطلبات الوقت الحقيقي للروبوتات الصناعية عالية جدًا ، متى ينفذ النظام قدرًا كبيرًا من حساب البيانات ، ويقلل من الأداء في الوقت الفعلي ، للنظام الاستجابة إلى تعدد المهام سيتعارض أيضًا مع النظام في الوقت الحقيقي أداء ؛ بالإضافة إلى النظام ستعمل الأسلاك المعقدة على تقليل النظام الموثوقية.
(2) السيد والعبد التحكم النظام:
باستخدام السيد والعبد على مستويين معالجات لتحقيق جميع وظائف التحكم في النظام. تدرك وحدة المعالجة المركزية الرئيسية الإدارة وتنسيق التحول وتوليد المسار والتشخيص الذاتي للنظام ، إلخ ؛ تدرك وحدة المعالجة المركزية التابعة التحكم في الحركة لجميع المفاصل. مخطط كتلة التكوين الخاص به ، كما هو موضح في الشكل
السيد والعبد يتمتع نظام التحكم بأداء جيد في الوقت الفعلي وهو مناسب لـ الدقة العالية والتحكم عالي السرعة ، لكن قابلية تطوير نظامه ضعيفة والصيانة صعبة. 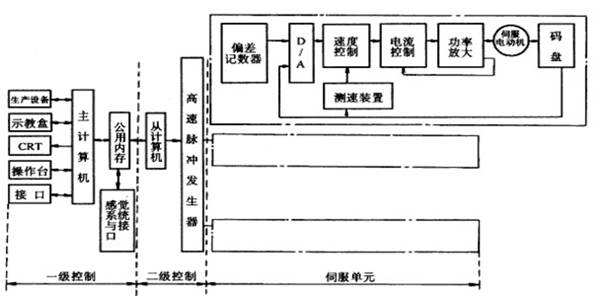
مخطط كتلة لنظام التحكم الرئيسي والعبد
(3) توزيع التحكم النظام:
وفقًا لطبيعة وطريقة النظام ، يتم تقسيم التحكم في النظام إلى عدة وحدات. لكل وحدة مهام تحكم واستراتيجيات تحكم مختلفة يمكن أن يكون كل وضع السيد والعبد علاقة أو علاقة متساوية.
هذا الطريقة لها أداء جيد في الوقت الحقيقي ، ومن السهل تحقيق السرعة عالية الدقة التحكم سهل التوسع ويمكنه تحقيق التحكم الذكي. إنها طريقة شائعة في في الوقت الحاضر.
الفكرة الرئيسية هي "التحكم اللامركزي ، الإدارة المركزية" ، أي أنه يمكن للنظام أن ينسق بشكل شامل ويخصص أهدافه ومهامه الشاملة ، ويكمل مهام التحكم من خلال تنسيق الأنظمة الفرعية. النظام بأكمله وظيفي ومنطقي و مادي. إنه لامركزي ، لذلك يسمى نظام dcs أيضًا نظام التحكم الموزع أو نظام التحكم الموزع.
في هذه البنية ، يتكون النظام الفرعي من وحدة تحكم وكائنات أو أجهزة مختلفة يتم التحكم فيها ، ويتواصل كل نظام فرعي مع بعضها البعض من خلال شبكة. توفر بنية التحكم الموزعة نظام تحكم آلي مفتوح وفي الوقت الحقيقي ودقيق. مستويين غالبًا ما تستخدم طرق التحكم في الأنظمة الموزعة.
مستويين نظام تحكم موزع ، يتكون عادة من كمبيوتر علوي وجهاز كمبيوتر سفلي و شبكة يمكن للكمبيوتر العلوي تنفيذ خوارزميات مختلفة لتخطيط المسار والتحكم ، ويمكن للكمبيوتر السفلي إجراء البحث وتحقيق الاستيفاء والتقسيم الفرعي والتحكم التحسين. يعمل الكمبيوتر العلوي والكمبيوتر السفلي بالتنسيق مع بعضهما البعض من خلال ناقل الاتصال يمكن أن يكون ناقل الاتصالات هنا على شكل RS-232 ، RS-485 ، EEE-488 و USB حافلة.
الآن ، تطوير إيثرنت و fieldbus توفر التكنولوجيا للروبوتات خدمات اتصالات أسرع ومستقرة وفعالة. خاصة ناقل المجال ، الذي يتم تطبيقه على موقع الإنتاج لتحقيق اتجاهين متعدد العقدة الاتصال الرقمي بين معدات القياس والتحكم ، وبالتالي تشكيل نوع جديد من شبكة متكاملة وموزعة بالكامل التحكم مجال النظام نظام التحكم في الحافلات fcs (مصنف التحكم في الحافلات النظام) ).
في شبكة إنتاج المصنع ، الأجهزة التي يمكن توصيلها عبر فيلدبوس يشار إليها مجتمعة باسم "الحقل الأجهزة / الأدوات". من يمكن أيضًا تلخيص منظور نظرية النظام ، الروبوتات الصناعية ، كأحد معدات الإنتاج للمصنع ، على أنها معدات ميدانية بعد إدخال fieldbus التكنولوجيا في نظام الروبوت ، فهي أكثر ملاءمة لدمج الروبوتات في بيئة الإنتاج الصناعي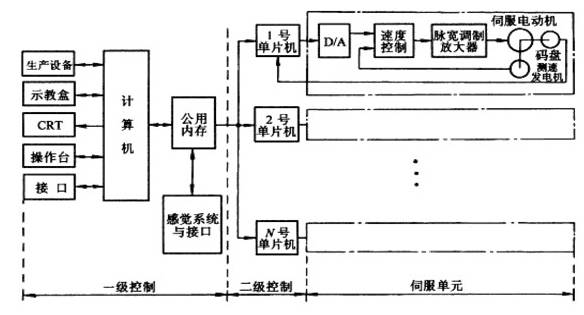
مخطط كتلة لنظام التحكم الموزع
مزايا نظام التحكم الموزع هي: مرونة النظام جيدة ، وتقليل مخاطر نظام التحكم ، واستخدام متعدد المعالجات يؤدي التحكم الموزع إلى التنفيذ المتوازي لوظائف النظام ، وتحسين كفاءة معالجة النظام ، وتقليل وقت الاستجابة.
عن الروبوتات الصناعية بدرجات متعددة من الحرية ، ويتعامل التحكم المركزي مع علاقة الاقتران بين كل محور تحكم بشكل جيد للغاية ، ويمكن تعويضها بسهولة. ومع ذلك ، متى يزداد عدد المحاور لجعل خوارزمية التحكم معقدة للغاية ، وسيتدهور أداء التحكم فيها. علاوة على ذلك ، متى يصبح عدد المحاور في النظام أو خوارزمية التحكم معقدًا للغاية ، وقد يؤدي إلى إعادة تصميم النظام في المقابل ، تتم معالجة كل محور حركة للهيكل الموزع بواسطة وحدة تحكم ، مما يعني أن النظام لديه اقتران أقل بين المحاور والنظام الأعلى
"الصناعة 4.0" يشير إلى الثورة الصناعية الرابعة بعد المحرك البخاري والكهربة والأتمتة. فهو يجمع بين الصناعة التقليدية وتكنولوجيا المعلومات الرقمية ويحقق الإنتاج الذكي بمساعدة تقنيات مثل البيانات الضخمة والحوسبة السحابية. في الصين ، "الصناعة 4.0" يعني ترقية البلاد التصنيع عن لهذا السبب ، وضعت الصين على وجه التحديد هدف التنمية المتمثل في "صنع في الصين 2025". الهدف هو نقل من دولة تصنيع كبيرة لدولة تصنيع قوية بحلول 2025.

هاتف : + 86-4000988557؛
سكايب المعرف: gfreex@hotmail.com؛
WeChat: STEP_ADTECH ؛
QQ المعرف: 8936906.




















يرجى القراءة ، البقاء على اطلاع ، الاشتراك ، ونحن نرحب بك لتخبرنا ماذا أنت فكر.
 IPv6 شبكة مدعومة 粤ICP备2021036697号
IPv6 شبكة مدعومة 粤ICP备2021036697号 خدمة الإنترنت
خدمة الإنترنت 4000988557
4000988557 sales1@troysupply.comsales2@troysupply.com
sales1@troysupply.comsales2@troysupply.com Richard Liu
Richard Liu TROY
TROY 8936906
8936906 Troysupply_com
Troysupply_com